
Programmable Multi Axis Controller№г·әУҰУГУЪТӘЗуі¬ёЯЛЩПмУҰРФДЬөДҫ«ГЬЦұПЯөз»ъЗэ¶ҜҝШЦЖЎўДЙГЧј¶¶ЁО»ҝШЦЖөИТФ°лөјМеЦЖФмЧ°ЦГОӘҙъұнөДјв¶ЛЙиұёЈ¬У®өГҝН»§өДёЯ¶ИЖАјЫЎЈ
CK3MКЗФЪҪфҙХРННвҝЗЦР»гјҜБЛProgrammable Multi Axis ControllerөДЗҝҙуФЛ¶ҜҝШЦЖДЬБҰЎў¶аі§ЙМәНёЯҝӘ·ўЧФУЙ¶ИөДЕ·Д·БъРВТ»ҙъФЛ¶ҜҝШЦЖЖчЎЈОӘБЛҪ«ҝН»§Ч°ЦГМбЙэЦБј«ПЮЈ¬Н»ЖЖПЮЦЖөДЧи°ӯЈ¬ТэөјЧ°ЦГ·ў»УіцҪПёЯРФДЬЎЈ
OMRONРВІъЖ·РЕПўЈәCK3M-CPU1Ўх1
2018-08-24 14:58:14өг»чЈә
ҝЙұаіМ¶аЦбФЛ¶ҜҝШЦЖЖч CK3MПөБР CPUөҘФӘ
CK3M-CPU1Ўх1

ДЈДвБҝРНЛЕ·юЗэ¶ҜЖчЈ¬АыУГҪПҝм
50ҰМs/5ЦбөДёЯЛЩ¶аЦбҝШЦЖКөПЦ
ёЯҫ«¶ИјУ№Ө


ҝЙҪ«ҝН»§Ч°ЦГМбЙэЦБј«ПЮөДCK3M
Rapid

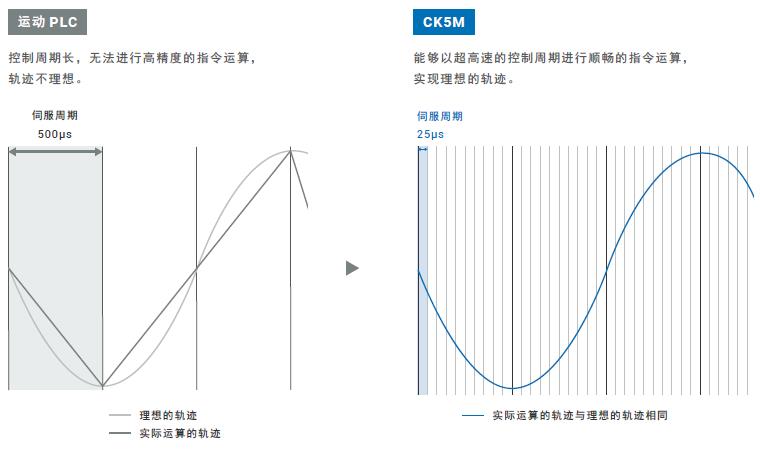
ЎҫКөПЦДЙГЧј¶өДёЯҫ«¶ИҝШЦЖЎҝ

ЖҫҪиі¬ёЯЛЩЛЕ·юСӯ»·ФЛЛгЈ¬ёЯЛЩёЯҫ«¶ИҝШЦЖВхИлРВБмУтЎЈ
С№ө№РФөДФЛЛгЛЩ¶ИҝЙҪшТ»ІҪКөПЦҝН»§Ч°ЦГөДёЯҫ«¶И»ҜЎЈ
і¬ёЯЛЩН¬ІҪҝШЦЖ

ҫЯУРЛЕ·юСӯ»·50ҰМs/5ЦбөДКАҪзҪПёЯЛ®ЖҪ*1өДФЛ¶ҜҝШЦЖјјКхЎЈЖҫҪиі¬ёЯЛЩ·ҙАЎҝШЦЖЈ¬ФЪҫ«ГЬјУ№Ө·ҪГжҝЙКөПЦёЯҫ«¶ИөД№мјЈҝШЦЖЎЈ
*1. ҪШЦБ2018Дк3ФВ ұҫ№«ЛҫөчІйҪб№ы
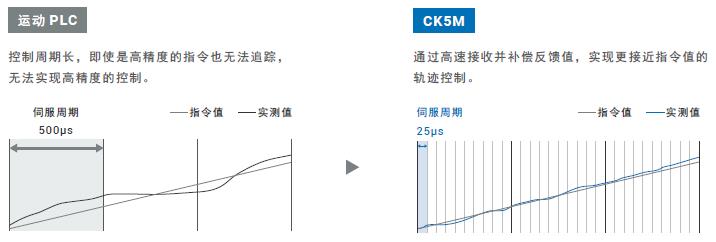
ЖҫҪиёЯЛЩЛЕ·юСӯ»·КөПЦёЯҫ«¶ИөД№мјЈҝШЦЖ
НЁ№эёЯЛЩҪУКХ·ҙАЎЦөІўФЪЦёБоЦө(ДҝұкЦө)ЦРЧціцРЮХэЈ¬КөПЦёьҪУҪьЙијЖЦөөД№мјЈҝШЦЖЎЈ
Flexible
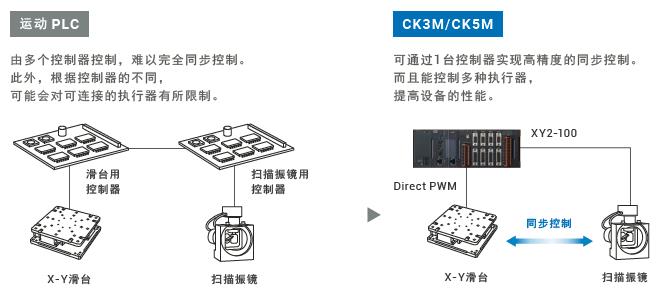
ЎҫКөПЦҪПјСөДЙиұё№№іЙЎҝ
Ц§іЦ¶аі§ЙМөДЗэ¶ҜЖчЎў№вХӨіЯЎЈ
°ЪНСЦЬұЯЙиұёөДПЮЦЖЈ¬ТэөјҝН»§Ч°ЦГ·ў»УіцҪПёЯРФДЬЎЈ
Ц§іЦёЯРФДЬ№вХӨіЯ
Ц§іЦA/BПаРЕәЕЎўҙ®РРКэҫЭI/FЈ¬КөПЦК№УГёЯРФДЬ№вХӨіЯөДёЯҫ«¶И¶ЁО»ҝШЦЖЎЈ
Ц§іЦ¶аЦЦЗэ¶ҜЖч
Ц§іЦ»щУЪДЈДвЦёБо(DACЎўPFM/ХэҪ»ВціеЎўЦұҪУPWM*2)өДЦбҝШЦЖЎЈ
ДЬ№»УлёЯПмУҰРФөДТфИҰөз»ъәНҫ«ГЬөДЦұПЯөз»ъөИёчЦЦөз»ъПаБ¬ҪУЈ¬ҪшРРҫ«ГЬөД»ъРө¶ҜЧчЎЈ
*2. ЦұҪУPWMҪсәујЖ»®А©Х№ЎЈ
ЕдұёEtherCAT® I/F
К№УГEtherCAT®ЦчХҫНЁРЕ¶ЛҝЪЈ¬ҝЙТФБ¬ҪУЛЕ·юЗэ¶ҜЖчЎўұдЖөЖчЎўКУҫхПөНіЎўёчЦЦҙ«ёРЖчәНI/OөИEtherCAT®ҙУХҫЈ¬№№іЙБй»оөДПөНіЎЈ
Capable
ЎҫНЁ№эЧФ¶ЁТеІ»¶ПЗҝ»ҜЎҝ
ҫЯУРёЯҝӘ·ўЧФУЙ¶ИөДProgrammable Multi Axis ControllerјЬ№№К№Ч°Ил¶АҙҙЛг·ЁөИҝН»§өДҙҙТвіЙОӘПЦКөЎЈ
ёЯЧФУЙ¶ИөДұаіМ
ДЬ№»УГCУпСФ/Programmable Multi Axis ControllerЧЁУГУпСФ/GҙъВлөИУпСФұаРҙҝН»§¶АУРөДёҙФУЎўЧЁТөЛг·ЁЎЈ

ҝЙТФЧФУЙұаРҙГи»жЧЁТө¶шёҙФУөД№мјЈөД»ъЖчИЛ»ъ№№өДҝШЦЖіМРтЎЈ

іэБЛЧФ¶ЁТеұкЧјGҙъВлНвЈ¬ҝН»§»№ҝЙ°ІЧ°ҫЯұё¶АУР№ҰДЬөДGҙъВлЎЈ
ЧФ¶ЁТеЛЕ·юЛг·Ё
ҝЙТФФЪҝШЦЖЖчДЪМнјУЧФјәұаРҙөДЛЕ·юЛг·ЁЎЈДЬ№»КөПЦХл¶ФёчЦЦ»ъРөҪб№№өДУЕ»ҜҝШЦЖЎЈ

Easy
ЎҫПсPLCТ»СщұгУЪК№УГЎҝ
ҪфҙХРННвҝЗДЬ№»·ҪұгөШЧ°ИлҝШЦЖ№сЦРЎЈ
Гв№ӨҫЯЎўҝЙҪшРРDINөј№м°ІЧ°Ј¬МбЙэБЛҝН»§өД°ІЧ°Ўўёь»»ЧчТөөДР§ВКЎЈ
ІЙУГДЈҝй»Ҝ·ҪКҪ
ІЙУГДЈҝйКҪНвҝЗЈ¬НЁ№эУлА©Х№өҘФӘ*3ЧйәПЈ¬ҝЙКөПЦ¶аЦЦ¶аСщөДУҰУГЎЈ
*3. CK3M-CPU1Ўх1¶аЦ»ДЬК№УГ2МЁЦбҪУҝЪөҘФӘЎЈ

Гв№ӨҫЯЈҰҪфҙХ
өҘФӘөДБ¬ҪУОЮРи№ӨҫЯЈ¬ҝЙЗбЛЙ»»ҪУЎЈҙЛНвЈ¬ҪфҙХөДЙијЖ*4УРЦъУЪҝШЦЖ№сөДРЎРН»ҜЎЈ

*4. К№УГCK2W - PD + CK3M - CPU + CK3W - AX*2МЁЎЈ
ҝЙҪшРРDINөј№м°ІЧ°

Ч°ИлҝШЦЖПөНіКұЈ¬ҝЙҪшРРұгУЪ№М¶ЁөДDINөј№м°ІЧ°ЎЈ
- ЙПТ»ЖӘЈәOMRONРВІъЖ·РЕПўЈәCK3W-AX1414Ўх / 1515 2018/8/24
- ПВТ»ЖӘЈәЎҫҝЙұаіМ¶аЦбҝШЦЖЖч CK3MПөБРЎҝРВЖ··ўІјЈ¬КөПЦДЙГЧј¶өДҝШЦЖ 2018/8/23







